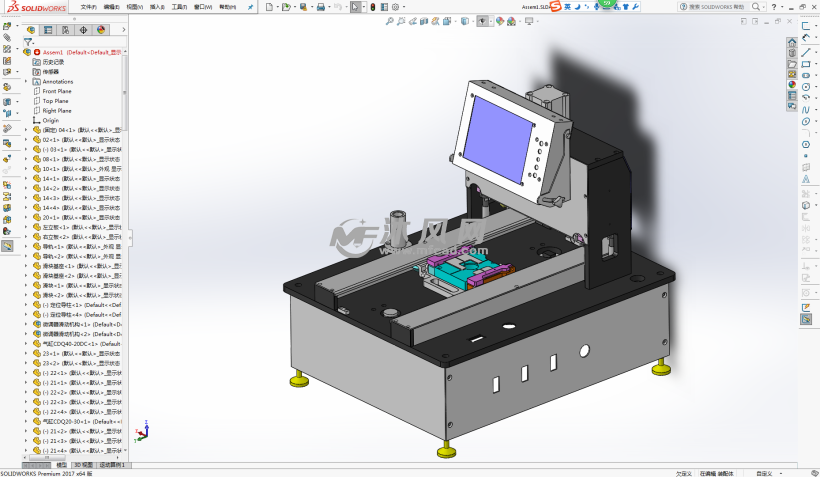
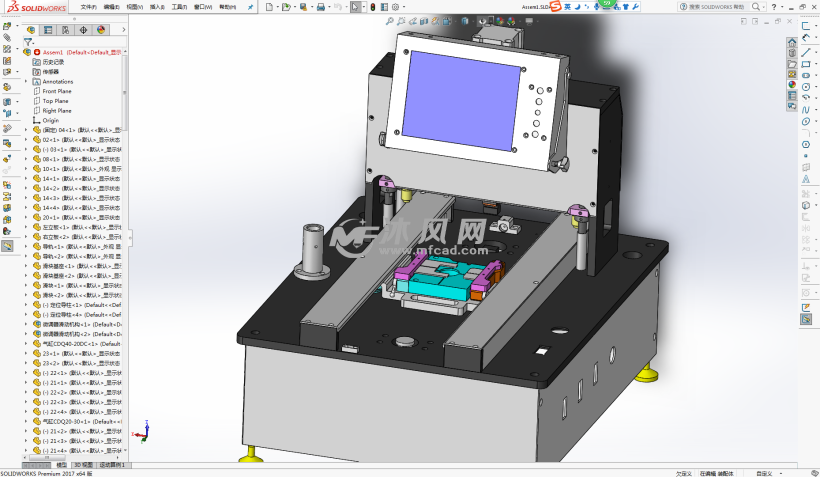
手邦机设计模型,本机的焊头架采用垂直导轨上下运动方式(Z向运动),二焊移动(跨距)通过焊头架水平导轨运动来实现(Y向运动),两种运动均采用进口步进电机驱动...
手邦机设计模型
发布时间:2017-11-20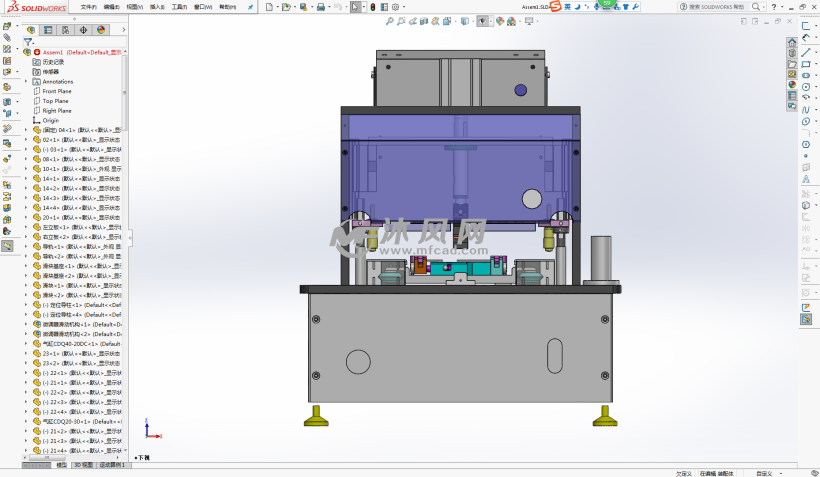 布局
布局
 含参数
含参数
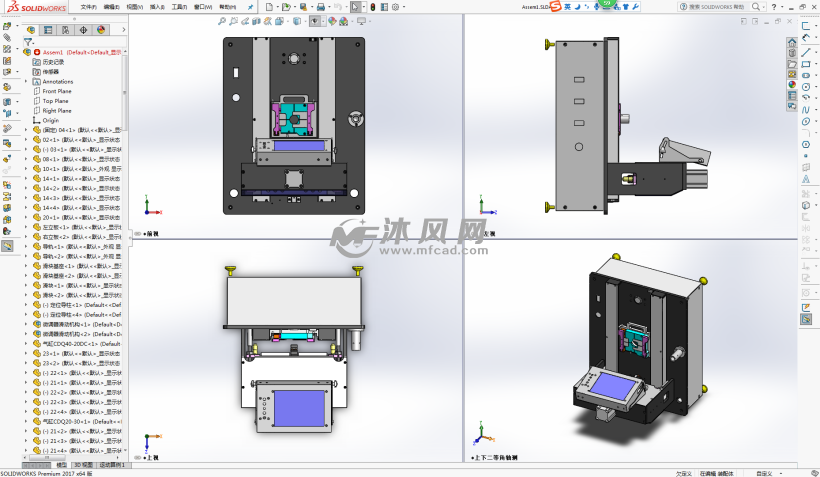 各方位图
各方位图
 模型树
模型树
 细节展示
细节展示
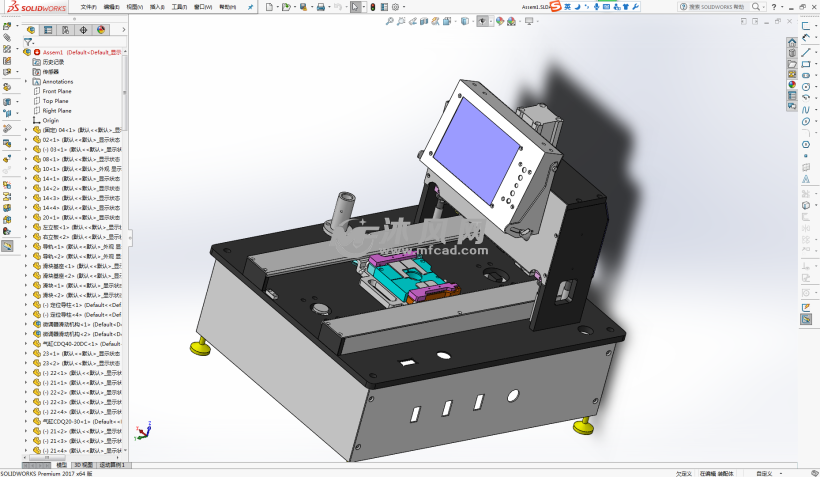
 总装
总装
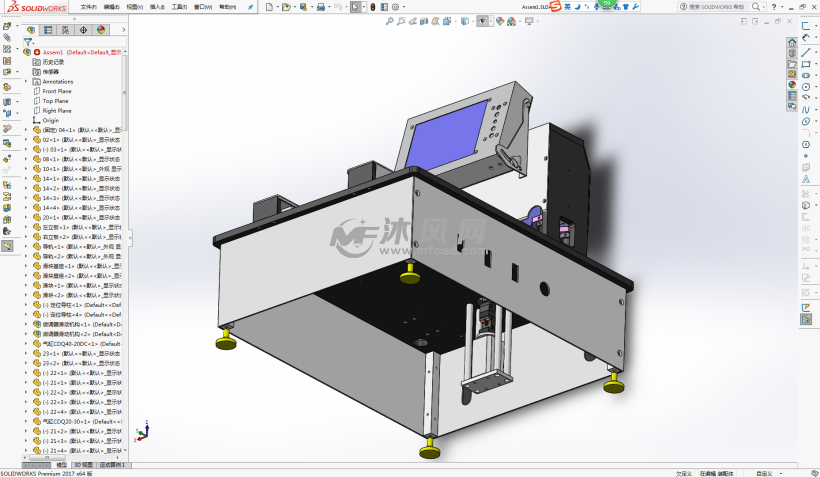
 总装细节
总装细节




图纸描述
手邦机设计模型,本机的焊头架采用垂直导轨上下运动方式(Z向运动),二焊移动(跨距)通过焊头架水平导轨运动来实现(Y向运动),两种运动均采用进口步进电机驱动
资料获取方法:微信扫描下方二维码,关注“万能资料全库”公众号,回复你需要的资料名称,
公众号会自动发给你,按要求下载即可!
